European Robotic Arm
De European Robotic Arm (ERA) is een robotarm die vastgemaakt gaat worden aan het Russische deel van het International Space Station.
Eigenschappen en taken
De intelligente ruimterobot heeft verschillende interessante eigenschappen. De belangrijkste zijn het vermogen om over de buitenkant van het ISS te 'lopen' (hand-over-hand tussen vaste aansluitpunten) en het vermogen om velerlei taken automatisch of halfautomatisch uit te voeren waardoor de menselijke bemanning van het ISS meer tijd overhoudt om ander werk te doen. Verschillende taken van de ERA zijn:
ERA wordt ontwikkeld in opdracht van de Europese Ruimtevaartorganisatie (ESA) door de Europese ruimtevaartindustrie met Dutch Space als hoofdaannemer en subaannemers in acht landen. De robotarm zal gelanceerd worden met een Russische protonraket en in de ruimte gebruikt worden door Russische kosmonauten. Tijdens de lancering zal ERA vastzitten aan het Multipurpose Laboratory Module (MLM). Deze Russische module zal ook als thuisbasis dienen voor ERA tijdens het gebruik van de robotarm.
- Installatie en ontvouwen van zonnepanelen.
- Vervangen van zonnepanelen.
- Inspectie van het station.
- Hanteren en verplaatsen van (externe) lasten (variërend van een camera tot een complete module van het ISS).
- Dienen als mobiel platform voor kosmonauten gedurende ruimtewandelingen.
ERA wordt ontwikkeld in opdracht van de Europese Ruimtevaartorganisatie (ESA) door de Europese ruimtevaartindustrie met Dutch Space als hoofdaannemer en subaannemers in acht landen. De robotarm zal gelanceerd worden met een Russische protonraket en in de ruimte gebruikt worden door Russische kosmonauten. Tijdens de lancering zal ERA vastzitten aan het Multipurpose Laboratory Module (MLM). Deze Russische module zal ook als thuisbasis dienen voor ERA tijdens het gebruik van de robotarm.
Busturing van ERA
Kosmonauten kunnen de robotarm van zowel binnen als buiten het ruimtestation besturen. Besturing van binnen het ruimtestation gaat door middel van een laptop (Intra Vehicular Activity-Man Machine Interface (IVA-MMI)) die een model van ERA en zijn omgeving toont. Besturing van buiten het ruimtestation gaat door middel van een speciale interface (Extra Vehicular Activity-Man Machine Interface (EVA-MMI)) die gebruikt kan worden door iemand in een ruimtepak.
Componenten van arm
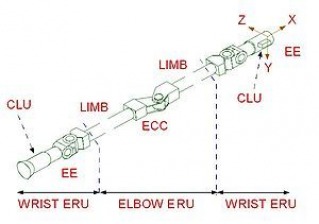
- Twee ongeveer vijf meter lange, symmetrische delen van de arm die gemaakt zijn van koolstofvezel.
- Twee identieke grijper mechanismen (End Effectors 'EE') die ook gegevens kunnen doorsturen en energie of mechanische kracht kunnen doorgeven aan de nuttige last.
- Twee polsen met ieder drie gewrichten.
- Een ellebooggewricht.
- Een centrale besturingscomputer die onderdeel is van de arm ('ECC').
- Vier camera’s met ingebouwde lamp ('CLU').
Technische gegevens
- Totale lengte - 11.3 m
- Massa - 630 kg
- Maximale last - 8000 kg
- Maximale snelheid - 0.2 m/s
- Positie nauwkeurigheid - 3 mm
